





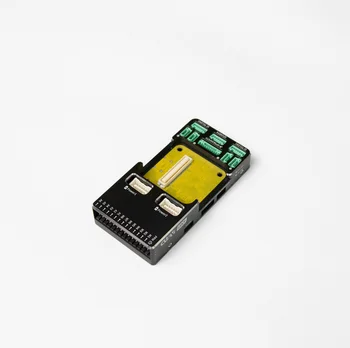







CUAV V5 + Nosiva Ploča Autopilot Pixhawk Kontrolor Leta za FPV RC Neradnik Квадрокоптер Helikopter Simulator Leta СВВП
V5 + Autopilot
Autopilot V5 + - ovo je poboljšana autopilot za akademske i komercijalne integratora.Dizajniran CUAV u suradnji s tim PX4.Temelji se na otvorene hardverske konstrukcije Pixhawk FMUv5, высокомодульная naknada, koristi standardne распиновки Pixhawk vanjskog sučelja, što omogućuje integraciju nese nadoplatu.Unaprijed iz kutije s autopilot PX4 open source i potpuno podržani ArduPilot.
Kratak sažetak
Glavni procesor FMU: STM32F765
32-bitni Arm® Cortex®-M7, 216 Mhz, 2 MB memorije, 512 KB ram-a
Procesor io: STM32F100
32-bitni Arm® Cortex®-M3, 24 Mhz, 8 KB SRAM
Brodski senzori:
Akcelerometar/Žiroskop: ICM-20689
Akcelerometar/žiroskop: BMI055
Magnetometar: IST8310
Barometar: MS5611
Sučelja:
8-14 PWM izlaza (6 od io, 8 od FMU)
3 namjenski PWM/hvatanje ulaza na FMU
Namjenski R/C ulaz za CPPM
Namjenski R / C ulaz za PPM i S. Bus
analogni /PWM RSSI ulaz
Сервовыход S. Bus
5 uzastopnih luka opće namjene
4 I2C Port
4 Gume SPI
2 CANBUS s dosljedan ESC
Analogne ulaze za napon /struja 2 baterije
Energetski sustav:
Snaga: 4,3 ~ 5,4 U
USB ulaz: 4,75 ~ 5,25 U
Ulazni signal servo: 0 ~ 36 U
Težina i dimenzije:














Copyright © 2024 Dizajn i Razvoj Ohyeahh.com.hr


